- 非IC关键词
企业档案






供应WD4500双CCD自动对位对位系统
WD4500
RNL
产品信息
WD4500双CCD自动对位对位系统
概述
十字对位系统是一种基于机器视觉技术的全自动对位系统,它通过工业相机分别抓拍需要对位的两个物料,通过特定的算法对图像中物料的靶标进行分析,确定其坐标位置,并将该坐标信息通过RS232接口将信息传送给PLC,由PLC控制位移平台带动物料做适当的移动,从而实现靶标的重合,完成对位的过程。
技术指标
Ø 对位检测:支持如下5种类型的靶标

Ø 检测速度:取决于放料速度,*大8次/秒
Ø 检测精度:当视场为4.6mm时精度为0.003mm
Ø 重复检测结果偏差值:0.001mm
Ø 检测数据处理:数据可显示于屏幕,并通过RS232接口输出
Ø 相机支持:黑白或彩色相机,支持双相机同时检测
Ø 设备供电
AC,220V
功耗=35W
Ø 环境条件
工作温度: 0°C ~ +40°C;
存储温度: -20°C ~ +55°C;
相对湿度: 20% ~ 80%。
Ø 结构要素
体积尺寸:220 mm×100mm×48 mm;
整机净重:3.5Kg。
系统组成
|
名称 |
品牌 |
型号 |
数量 |
单位 |
|
检测主机 |
Intel* |
HRC-11 |
1 |
台 |
|
相机 |
|
HRC-CAM-C300 |
2 |
台 |
|
镜头 |
COMPUTAR |
*像素机器视觉镜头 |
2 |
个 |
|
光源 |
|
白色条形光 |
2 |
个 |
图1 HRC-11嵌入式CCD检测主机

图2 相机及镜头

对位过程说明
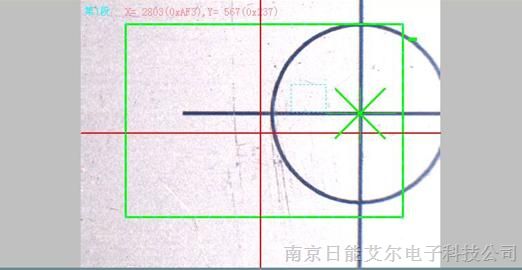
下图为十字对位系统的屏幕截图,屏幕分上下两部分,分别对应于不同的镜头,每一个镜头均可*对位。观察图3的上半部分,有一个红色的十字线,该十字线为系统自动生成并叠加上去的,其交点即为对位时的原点。为物料上的靶标。*色部分为CCD系统自动寻找到的十字靶标中心,CCD系统寻找到靶心后即可获得其坐标值,便将坐标值通过RS232接口传递给PLC,PLC根据这个坐标值,移动位移平台,直到靶心与红色十字线中心重合,则对位过程完成。